 ���ں�
���ں����Ὺ�������ڲ�ƽ·���ȶ���Ч�ƶ��Ļ�����
2021-12-17 18:17:14
- +1 ������
�������밲ȫ�ȶ� �ҵ�Ƶ�����ձ��������������Ἧ�Ź�˾(�³ƣ�����)�������Ѿ�������һ���ܹ��ڲ�ƽ·�����ȶ���Ч�ƶ��Ļ����ˡ�

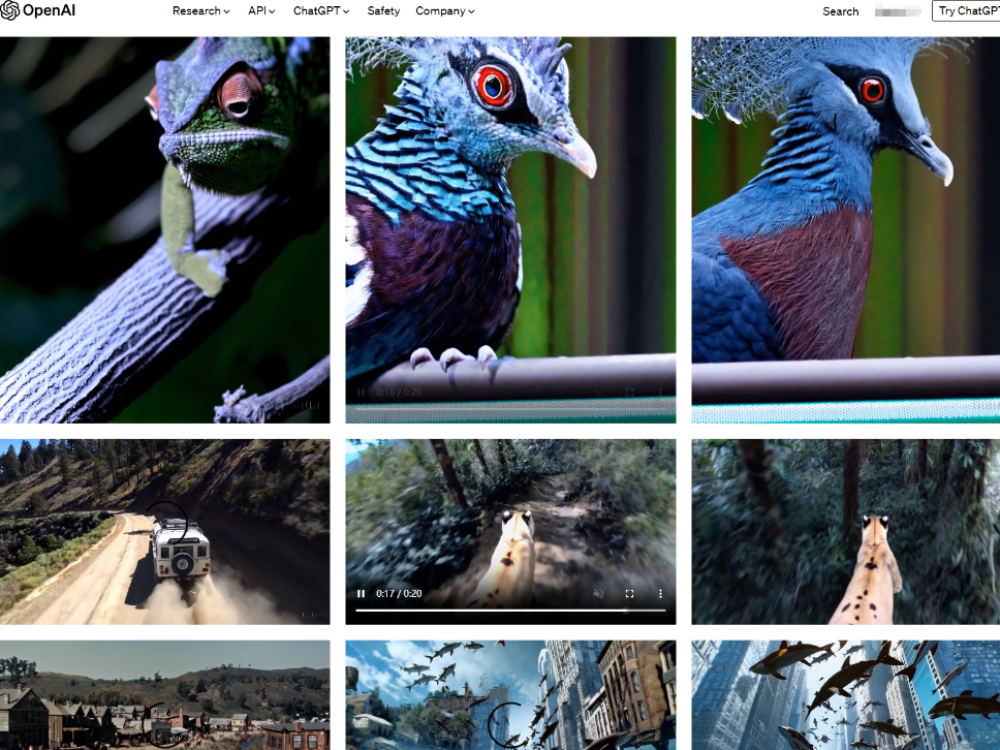
��������Ƶ���ӣ�https://www.sony.com.cn/content/dam/sonyportal/images/%E7%B4%A2%E5%B0%BC%E8%A7%86%E9%A2%912.mp4
�û����˵ײ������������ȵ�������ƣ��Ȳ��ṹ������װ�����ӵ���������ɡ��û�������ƽ����ʹ�����ӣ�����¥�ݵ��и߶Ȳ�ĵط���ʹ�����Ӻ����������ƶ�����������øû�����������ƽ̹���Dz�ƽ̹��·�涼���ȶ�����Ч�����С���ģ�ͼ̳���2021��������ܻ�������ϵͳ����(IROS 2021)��չ�������������������˵������������й����л��߾�ֹ״̬�£��������Է�ɢ�Ȳ����ɡ��������ʹ�������ܹ�����ߴ�20�������������˸�����Ч�ʡ�
�û������������з����Ľ��п�����
��Ҫ�ص�
���������ô���ȫʱ�ȶ��Ժ�Ч�˶�����
�û����˵ĵײ������������ȵ�������ƣ��Ȳ��ṹ������װ�����ӵ���������ɡ���һ�������ʹ�������ܹ����ݻ�����������ʹ�ó�������������ʽ�ƶ����������Ƚ�����������ʽ�ƶ�֮������л��������˿�����ƽ�����������ƶ�������¥�ݵ��и߶Ȳ�ĵط�ʹ�����Ӻ����������ƶ������ַ�ʽ�Ƚ������ƶ����죬����ʵ�ָ�Ч�������ƶ�����ʹ��ƽ����ƽ��·���ƶ�ʱҲ�ܱ����ٶȡ����⣬�����ȵ����ȷ�������κ�ʱ���������������Ӵ����ṩ��ƽ�ȵ������˶���ʹ��������������ƽ̹��ƽ��·�����ƶ�������ҡ�Ρ�
ͨ�����ط������ʵ�������������Ч
�û����˼̳���������IROS 2021��չ�����ĽŻ����˵����������Է����Ȳ��͵���ϵĸ��أ�ʹ�����˿���������20��������������ȵؼ����˻����˾�ֹʱ֧�������������ĵ��������Ӷ�ʵ�ָ�ˮƽ����ԴЧ�ʡ�ͨ����װ�ܹ�����̬ͼ�����Ƶ��360������Ͳ����豸���豸�����Ϲ��ܽ���Ӧ������������Լ������DZ�ڳ�������Ѳ�ߺͼ��Ͳ�������

�������Ȳ��ṹ
�Ƚ��Ļ������ƣ����������������Ӧ
��ʹ������������ͬһ�ռ���ҵ�����Ὺ����ϵͳҲ��ȷ����ȫ���ȶ��������Ļ������ƣ�������ʵ��Ӧ���ڸ�����ҵ�������֮�������������������Эͬ����ϵͳ����ϵͳ�������ؿ���ʩ���ڻ����˹ؽ��ϵ�������ʹ�ڲ�ƽ·����Ҳ���Ա����ȶ����С��û����˻������Զ��رܹ��ܣ���ʩ������ʱ������ȵؼ��ٳ���ͷ�ɢ����������δ����Ŀ���ǽ�һ������������ƶ����������ƶ��ƶ�·�ߣ�ͬʱȷ���ȶ����ơ�
������ǿ˲ʱ�����EDLC����ϵͳ
�Ȳ��ƶ���Ҫ˲ʱ����������û������䱸��һ���綯˫�������(EDLC)���ܹ��ṩ��ֵ��������ʹ��������Բ��ý�������ƣ�������Ὣ����Ŭ������ʵ�ָ�����Ч�����������ɵĵ����ơ�
��Ҫ���
�ߴ�
�߶ȣ�720 �C 1220mm(500mm�ɱ��г�)
����: 912 mm
����: 672 mm
������(�����)
89 kg
�����������
����20kg
�ƶ��ٶ�
���1.7m/s
�ƶ��߶Ȳ�
���30cm
��������ʱ��
Լ4Сʱ
(�����ģʽ��ͬ����ͬ)
���ɶ�
16��������(�����˶���6�ᣬ�Źؽ���ת��6�ᣬ�����֣�4��)
4��������(����ԭ��ȫ����)
(��������Ӣ�����Ÿ壬���ο�)









������Ѷ
������Ƶ
��Ʒ����
 X
X

 ����֤��¼
����֤��¼
 QQ�˺ŵ�¼
QQ�˺ŵ�¼
 ���˺ŵ�¼
���˺ŵ�¼

































